Robots are on the cusp of a profound transformation. In the near future, they may independently execute search-and-rescue missions, inspect damaged industrial structures, or explore hazardous environments where humans cannot safely go. Yet achieving this level of autonomy requires more than adding new sensors or faster processors. It demands the ability to move through unfamiliar, disordered terrain without becoming confused, trapped, or dependent on constant human oversight.
The most significant barrier to this autonomy is navigation. Traditional robotic systems lean heavily on satellite-based global positioning systems, which help a robot understand where it is and where it needs to go. But GPS is fragile. In underground caves, forests, collapsed buildings, deep mines, and other unstructured spaces, signals become distorted, unreliable, or vanish altogether. Without a dependable sense of position, even the most advanced robots can quickly lose direction, drift off course, or fail catastrophically at the worst possible moment.
In response to this challenge, researchers at the Beijing Institute of Technology have turned their attention to nature. Their newly developed navigation framework—soon to be published by Cell Press—draws inspiration from insects, birds, and rodents. This biologically grounded approach creates a system capable of operating where GPS fails, offering robots a flexible and resilient way to move through some of the world’s most demanding environments.
Learning from Nature’s Most Skilled Navigators
Nature has spent hundreds of millions of years refining the art of navigation. Animals of all types—from ants and bees to migrating birds and long-distance foraging mammals—have evolved strategies that allow them to travel with remarkable accuracy and endurance. While past robotics research often focused on a single species or behavior, the Beijing team recognized that biological navigation is not reliant on one perfect mechanism. Instead, animals combine overlapping strategies in a principle known as degeneracy: multiple systems performing similar tasks in slightly different ways, ensuring stability when any one system falters.
This insight shaped the foundation of their work. Rather than isolating one biological strategy, the researchers built a unified, neuromorphic framework that blends three distinct navigation modes. Each contributes a different form of spatial awareness, and together they provide a robust, fault-tolerant navigation system capable of supporting long-term autonomy.
Their approach captures not just the mechanics of how animals navigate, but the deeper biological logic underpinning resilience itself: the ability to adapt, compensate, and maintain function even when conditions deteriorate.
A Three-Layered Framework for Ecological Navigation
Central to this breakthrough is a modular architecture that mirrors three biological strategies: insect path integration, birdlike multisensory fusion, and rodent cognitive mapping. Each module solves a different aspect of the navigation puzzle, operating both independently and cooperatively.
The first layer draws inspiration from insects, whose survival depends on the ability to track their own movements relative to a starting point. Ants and bees encode distances traveled, turning angles, and direction relative to the sun, enabling them to return to their nests even in chaotic landscapes. The researchers replicated this functionality using a spiking neural network implemented on low-power neuromorphic hardware. Acting as an internal “step counter,” it continuously keeps track of a robot’s motion relative to its origin, providing a stable self-referenced estimate of position—crucial when external cues vanish.
The second layer, modeled on the multisensory capabilities of birds, integrates information from several sensory channels. Migratory birds combine visual cues, magnetic fields, and polarized light to maintain a reliable sense of direction across thousands of kilometers. The research team mimicked this strategy with a Bayesian sensor fusion system, blending inputs from a quantum magnetometer, a polarization compass, and visual data. This redundancy ensures that if one sensor fails, another can maintain the robot’s heading, preserving navigational continuity in dynamic or degraded conditions.
The third layer takes inspiration from rodents, whose hippocampus enables them to build cognitive maps of their surroundings. Rather than updating a spatial map continuously—which is computationally costly—the rodent-inspired system saves energy by encoding only salient landmarks, mirroring the brain’s efficiency. This selective mapping provides memory of the environment without overwhelming hardware limits, allowing robots to form stable, scalable spatial representations in real time.
When combined, these three modules create a framework far more resilient than any single biological or engineered system. If one component fails, the others compensate seamlessly, reflecting the same robust architecture that animals use to survive in unpredictable ecosystems.
Testing the System in the Real World
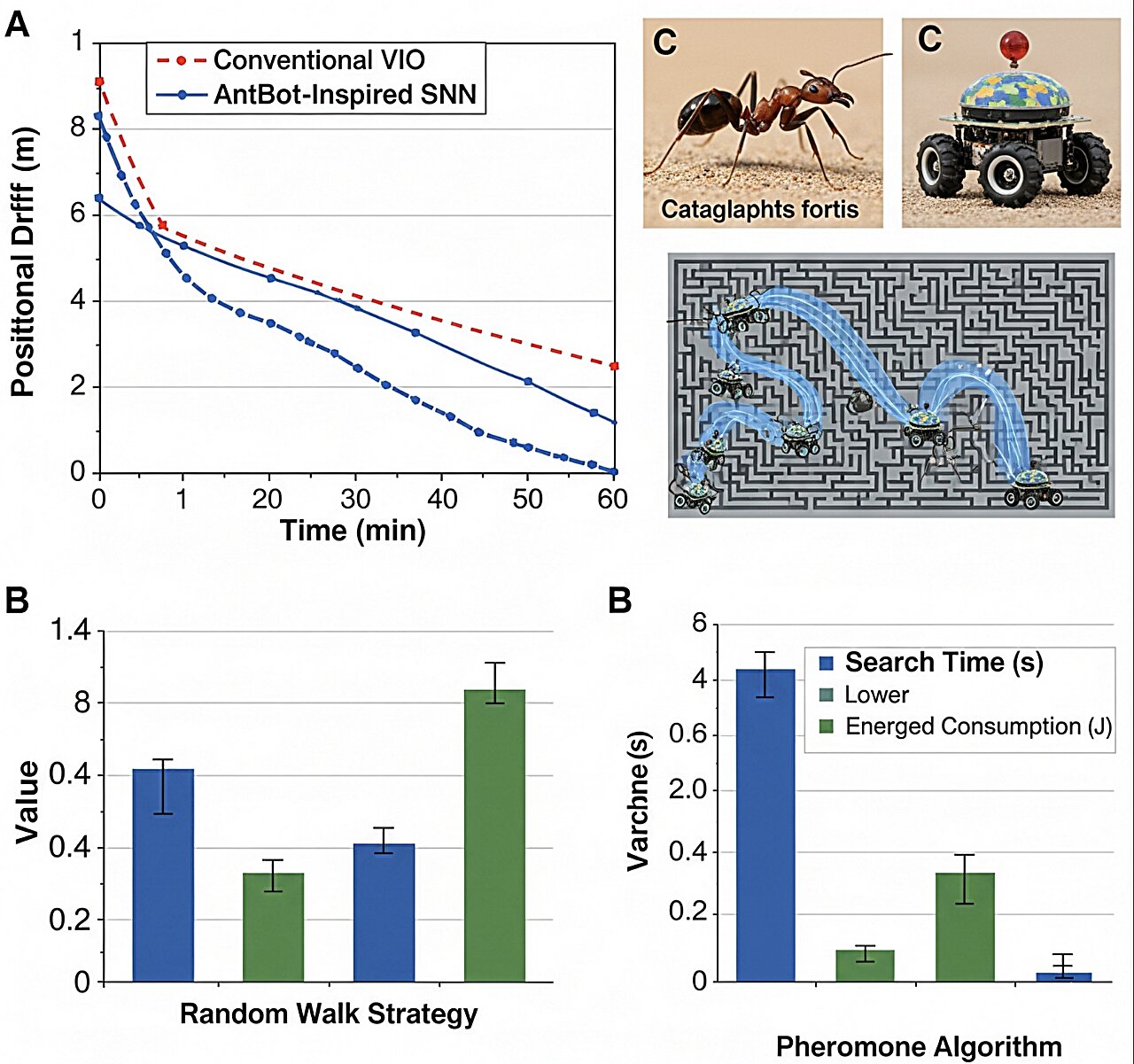
To determine whether their biologically inspired navigation system could withstand real-world conditions, the researchers conducted extensive field experiments across 23 different robotic platforms. These machines were deployed in a wide range of challenging environments—from abandoned mines and dense forests to cluttered industrial zones where GPS signals failed entirely.
The results were striking. Compared to conventional SLAM (Simultaneous Localization and Mapping), their system reduced positional drift by 41 percent, meaning robots stayed on course significantly longer without accumulating errors. It also demonstrated up to 60 percent higher energy efficiency, a crucial advantage for robots operating far from charging stations or in prolonged missions.
Perhaps the most impressive achievement was its resilience to sensor failure. When one of the robot’s primary sensors was intentionally compromised—for example, when the main camera was blinded—the system recovered full navigational accuracy in just over three seconds. This rapid recovery is a direct result of the framework’s degeneracy: multiple overlapping subsystems stepping in the moment one falters, ensuring continuous performance without human intervention.
These gains did not represent incremental improvements to existing methods. Instead, they signaled the emergence of an entirely new paradigm—one that treats navigation not as a single algorithm but as a living system with interdependent processes.
Toward Autonomous Machines with Ecological Intelligence
The potential applications of this work stretch across numerous fields where autonomy is not just desirable but essential. Robots navigating collapsed buildings after earthquakes could use this system to avoid hazards and locate survivors even when visibility is limited and sensors fail. Machines exploring extraterrestrial environments—such as lunar lava tubes or Martian canyons—could operate reliably without GPS or pre-existing maps. Deep-sea robots, long-duration drones, and inspection bots in hazardous industrial sites could all benefit from a navigation system that remains stable even when conditions deteriorate unpredictably.
Beyond its immediate applications, the framework represents a conceptual shift. It provides a blueprint for designing robots that can operate with genuine ecological fluency—able to read, interpret, and adapt to the environment with a biological degree of robustness. Rather than mimicking isolated behaviors from nature, it embodies the integrative intelligence that makes living organisms so adaptable in the wild.
The Next Frontier: Lifelong Adaptation and Learning
While the current system is powerful, the researchers acknowledge important opportunities for improvement. At present, the neural weights in their system are preconfigured, meaning the navigation modules do not change or learn as the robot experiences new environments. Biological brains, however, rely on continuous learning, adjusting neural connections through mechanisms like synaptic plasticity.
The team aims to integrate these capabilities using emerging technologies such as memristive synapses—hardware components designed to mimic dynamic learning in neural tissue. This would allow robots to refine their navigational strategies through experience, becoming more adaptable over time and better equipped to handle new environments without manual recalibration.
Another challenge is scaling the cognitive mapping system to kilometer-scale environments. Achieving this will require more advanced memory organization techniques that can efficiently store and retrieve spatial information without overwhelming computational resources.
Their ultimate goal is ambitious but transformative: to build robots that navigate not by executing static algorithms, but by embodying the same continuous learning, flexibility, and resilience that define biological intelligence.
Toward a New Era of Autonomous Exploration
The research emerging from the Beijing Institute of Technology signals a turning point in robotics. By weaving together the strategies of insects, birds, and rodents, the scientists have crafted a navigation system that mirrors the layered complexity of living organisms. Their innovation moves robotics beyond narrow technical solutions toward a more holistic, biologically grounded paradigm.
This work underscores a profound truth: the natural world remains humanity’s greatest engineer. By studying how animals thrive in unpredictable landscapes, researchers are creating machines capable of venturing into places where human presence is impossible or perilous. Whether the task is searching for survivors in a collapsed building, exploring other worlds, or inspecting hidden infrastructural faults, these robots will operate with a level of reliability and independence once thought unattainable.
As researchers continue to refine their framework—integrating lifelong learning, expanding spatial memory, and optimizing neuromorphic hardware—we move closer to a future where robots possess not only the tools but the instincts to navigate the unknown. In that future, machines will not simply mimic life; they will draw upon the same principles that allow living organisms to explore, adapt, and survive.
The emerging era of autonomous exploration begins with a simple insight borrowed from nature: resilience is not the product of a single perfect system but the harmony of many overlapping ones. Through this lens, robots will become more than machines. They will become partners capable of operating in the most demanding environments on Earth and beyond, guided by the evolutionary genius of the natural world.
More information: Chandan Sheikder et al, A neuromorphic framework for bio-inspired navigation in autonomous robots, SSRN (2025): DOI: 10.2139/ssrn.5674916