Microrobots—tiny machines that are smaller than a millimeter—are revolutionizing fields like medicine, manufacturing, and environmental cleanup. Imagine a robot so small, it could be injected into the human bloodstream to deliver life-saving medicine directly to a specific area, or a fleet of them working together to repair a piece of machinery on the microscopic scale. These little robots have the potential to accomplish tasks that would otherwise be impossible with conventional tools. But despite their promise, there’s one major obstacle that has kept these robots from reaching their full potential: navigation.
For these tiny machines, traditional methods of control are simply too large, too complicated, and too unwieldy. So, researchers have spent years trying to come up with simpler, more efficient ways to guide these robots through their tiny environments. And in a recent groundbreaking study, a team of engineers and scientists found a way to break through this barrier, using an unexpected source of inspiration: Einstein’s theory of general relativity.
The Struggles of Tiny Machines
To understand the challenge, imagine trying to pilot a ship across the ocean, but without any navigational tools or a captain’s cabin. Instead of a crew or onboard sensors, these microrobots rely on their environment to help guide them. Their size—smaller than a grain of sand—means they lack the space for the computing power, sensors, and actuators needed for complex navigation. They simply don’t have the “brain” that bigger robots or machines possess.
This limitation has forced researchers to use two primary methods of controlling these microrobots: one involves external feedback, and the other uses “reactive control.” External feedback systems, like optical tweezers or electromagnetic fields, can manipulate the microrobots with great precision. However, while these methods work for small numbers of robots, scaling them to control large swarms has been a challenge. Reactive control, on the other hand, allows robots to act on sensory inputs to adjust their movements in response to their environment—no external controls required. However, this approach has also come with its own set of issues, especially when robots need to navigate more complex environments or meet at a specific destination.
“We use on-robot sensory inputs to immediately modulate the robot’s actions in response to a global control field,” the researchers explain. “This approach is minimalist and well suited to microrobots that often lack sophisticated sensing or computation due to their small size.” Yet, even with this method, navigating obstacles or converging at a particular point remained difficult.
It was clear that something more was needed—a new way to give these tiny machines the ability to navigate and perform complex tasks without overwhelming their small size.
A Lightbulb Moment: Geodesics in Curved Spacetime
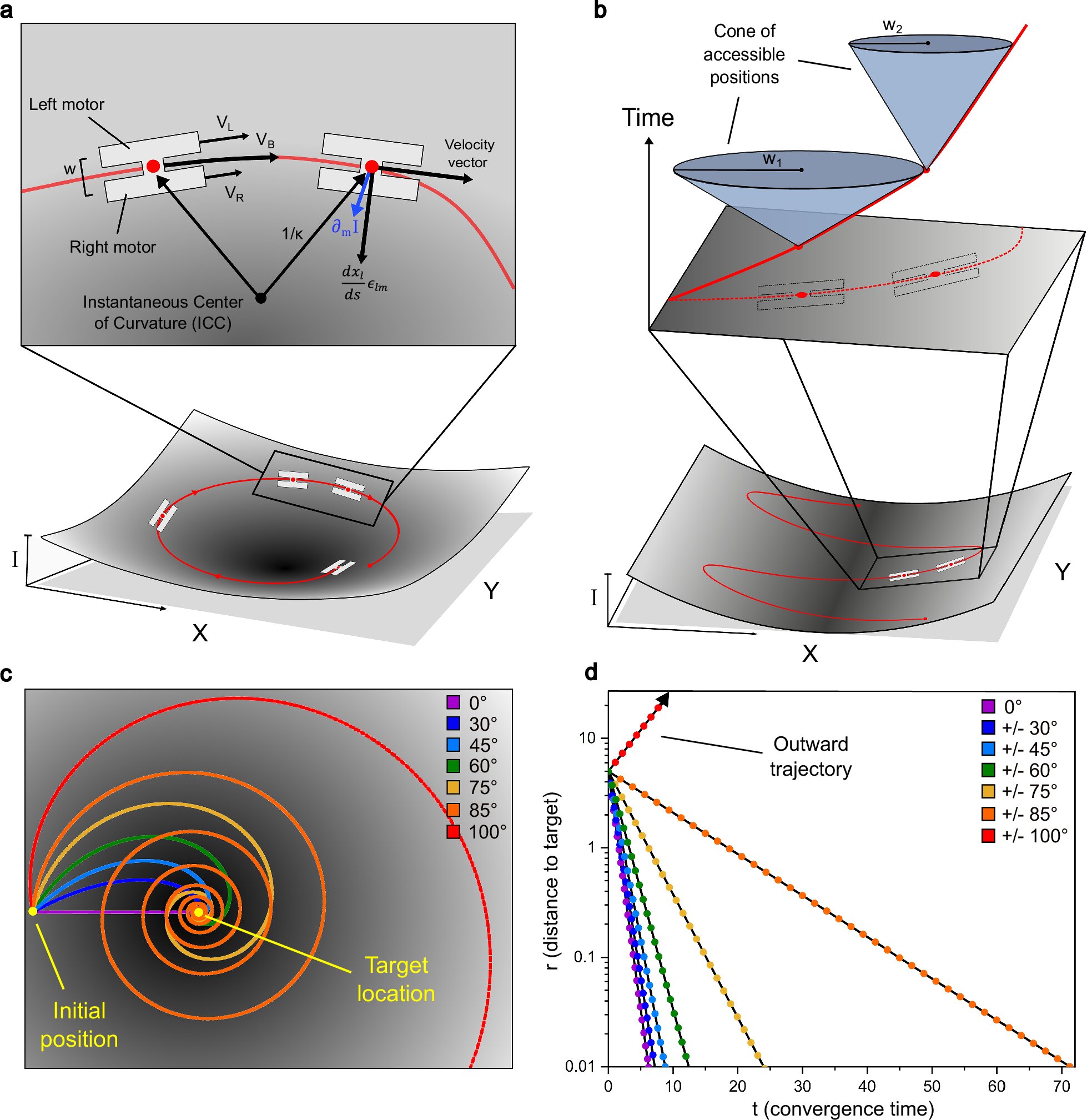
Then, something unexpected happened. The researchers realized that the motion of these microrobots could be mathematically described in a way that was strikingly similar to the way light behaves in general relativity. In simple terms, they discovered that the paths the robots follow are analogous to the way light curves through spacetime under the influence of gravity.
To apply this insight, the researchers created a framework based on the geometry of spacetime—what they called “artificial spacetimes.” Just as general relativity describes how mass bends spacetime, this new framework allows robots to move in a manner that adapts to their environment without needing onboard computation or complex sensors. The control field itself—the “spacetime” in which the robots operate—guides their movement, similar to how gravity curves the paths of light or objects in space.
“We present metrics that generate primitive behaviors in unobstructed environments. These include navigating to specific locations, confining, diverging, or turning in prescribed ways,” the researchers explain. By leveraging the natural geometry of the environment and creating virtual spaces through mathematical transformations, they were able to control the robots with remarkable precision.
This solution worked, not only in theory but in practice, as the researchers successfully tested their approach in both simulations and real-world experiments. In one experiment, they used silicon microrobots that were powered by light. These robots had two motors, each with arrays of silicon photovoltaics, which allowed them to move in response to varying light intensity. The robots followed commands to navigate, turn, and disperse, without needing any onboard decision-making power. The control field guided their every move, just as the curvature of spacetime would direct the path of light.
The Future of Microrobots: Endless Possibilities
What does this mean for the future? By introducing the concept of artificial spacetimes, the researchers have opened up new possibilities for controlling large numbers of simple microrobots. This breakthrough could make it possible for robots to work together in coordinated swarms to perform complex tasks, without the need for each robot to be individually programmed with a high level of intelligence.
“The method successfully allowed us to prevent robot collisions with walls and give instructions for navigation, patrolling, turning, or dispersion without the need for on-robot computation,” they explain. This could be a game-changer for fields like medicine, where microrobots could be used for targeted drug delivery, or environmental cleanup, where swarms of robots could tackle pollution at an unprecedented scale. In the realm of micro-manufacturing, these robots could carry out precise tasks with incredible efficiency, potentially reshaping entire industries.
However, while the approach has shown great promise, the researchers are quick to acknowledge that there is still work to be done. The current model is limited to two-dimensional environments, and the robots themselves are of a specific type. But the potential for improvement is vast. The researchers are already considering how to extend the framework to allow for time-dependent control, which could help avoid robot-to-robot collisions and enable robots to “speed up or slow down” in response to specific tasks.
They are also exploring the possibility of allowing robots to generate their own control fields, a move that could lead to entirely new behaviors. “Work along this route might target robot-to-robot collision avoidance or sequential exploration of space by causing individual robots to speed up or slow down upon arriving at specific spacetime locations,” the team explains. This could pave the way for robots that work together even more seamlessly, learning from one another and adapting to their environment as a collective.
Why This Research Matters
At first glance, microrobots may seem like a niche technology—too small, too complex, and too specialized for the average person to care. But the breakthrough presented in this study has the potential to transform industries and improve lives in ways we’re only beginning to understand. From delivering drugs with pinpoint accuracy to cleaning up polluted ecosystems, microrobots could help solve some of the world’s most pressing challenges. And thanks to this new method of control, that future is now within reach.
By allowing simple robots to perform complicated tasks in a coordinated fashion, the researchers have not only overcome one of the biggest hurdles in microrobot design but also unlocked a world of possibilities that could change the way we think about robotics and automation. In the not-too-distant future, these tiny machines could become an essential part of our daily lives, working tirelessly in places that humans simply cannot reach.
This research is a reminder that sometimes, the smallest ideas can lead to the most significant breakthroughs. And in the case of these microrobots, that breakthrough may one day change the world.
More information: William H. Reinhardt et al, Artificial spacetimes for reactive control of resource-limited robots, npj Robotics (2025). DOI: 10.1038/s44182-025-00058-9