When we watch a caterpillar inch across a leaf, its movement seems almost too simple: a gentle wave of bending and stretching that carries it forward with surprising efficiency. But within that seemingly effortless crawl lies an elegant lesson in biomechanics—one that scientists are now learning to apply in the creation of the next generation of soft robots.
Inspired by this natural motion, researchers from the Department of Chemical Engineering at Chung-Ang University in South Korea, led by Professor Suk Tai Chang and Assistant Professor Changyeon Lee, have developed a groundbreaking way to replicate caterpillar-like crawling in artificial systems. Their innovation, published on July 30, 2025, in Advanced Functional Materials, could transform how soft robots are designed, making them cheaper, more sustainable, and far more versatile.
The Challenge of Soft Robotics
Soft robots differ from traditional machines in one key way: instead of rigid metal and gears, they are built from flexible, deformable materials that bend, stretch, and twist like living organisms. This gives them an incredible range of motion and adaptability, opening up possibilities in fields from medicine to environmental monitoring.
However, controlling this flexibility has been a major obstacle. To move like a caterpillar, a soft robot must bend asymmetrically—that is, one part must stretch while another contracts, creating a sequence of controlled curves. Most systems attempt this by embedding complex heating circuits or using advanced materials, but these methods are often expensive, energy-intensive, and difficult to scale.
Einstein once said that nature is subtle but not malicious. The challenge in soft robotics is not nature’s mystery, but our ability to replicate it without overcomplicating the solution.
A Simple Solution: Paper and Electrode Patterns
Instead of relying on intricate engineering, Prof. Chang’s team looked to one of the simplest materials available: paper. Not only is paper cheap and widely available, but its porous structure also makes it highly suitable for depositing thin electrodes. More importantly, it bends easily—perfect for creating the foundation of a crawling robot.
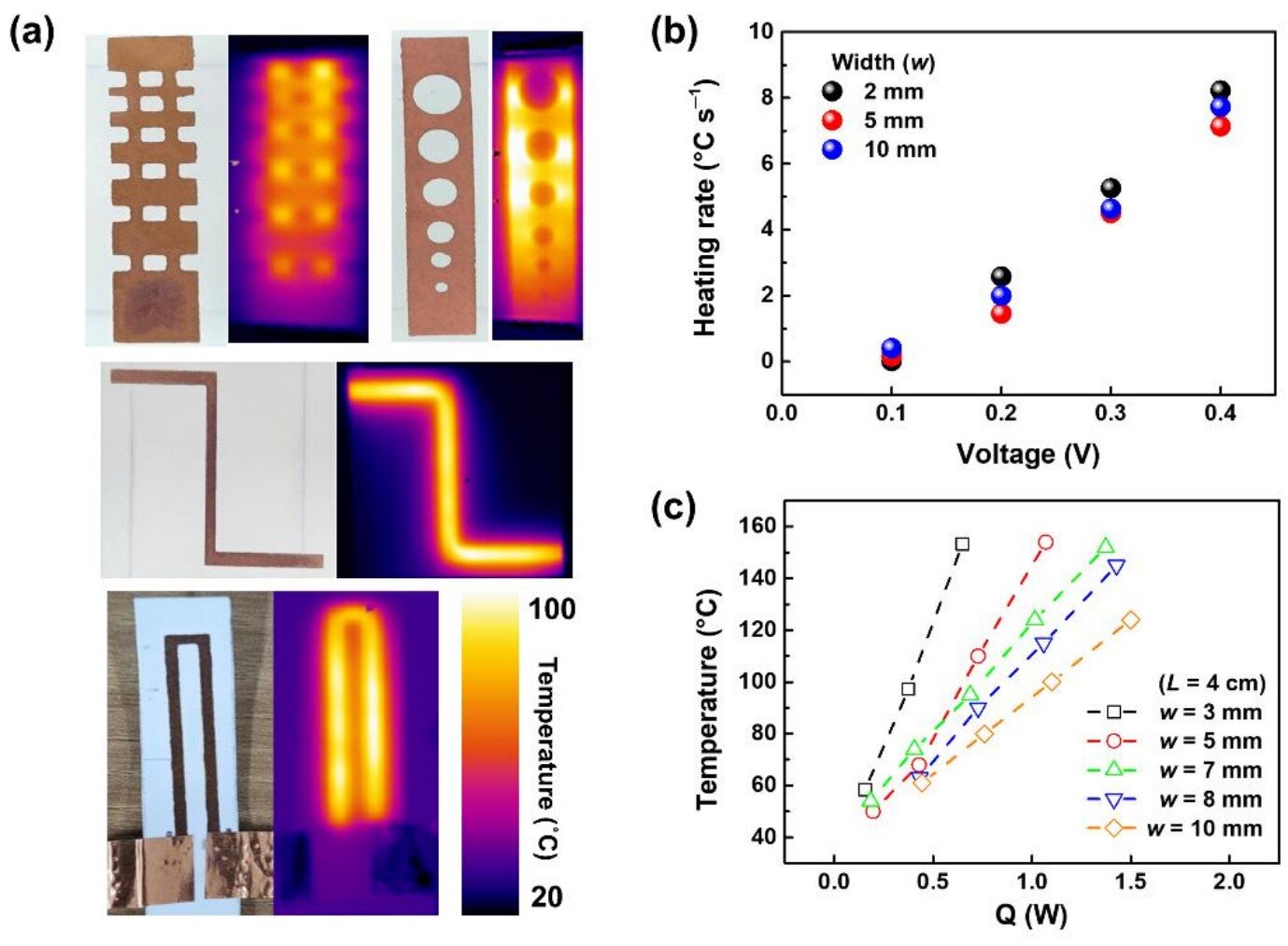
Using a method called electroless plating, the researchers patterned copper (Cu) electrodes onto paper in an asymmetric fashion. By carefully varying the widths of these electrodes, they created tiny resistance gradients. When electricity flowed through the electrodes, these resistance differences caused uneven heating across the paper. This simple trick produced controlled temperature gradients, which in turn made the robot bend unevenly—exactly the type of asymmetric motion needed for crawling.
This paper-electrode system was then paired with liquid crystal elastomers (LCEs), a special class of polymers that contract or expand in response to heat. Together, the paper and LCEs formed a bilayer structure that mimicked the caterpillar’s natural bending rhythm.
Crawling Like a Caterpillar
The result was a soft robot that could crawl forward with remarkable efficiency while using very little power. Unlike earlier designs that required high voltages or complicated setups, this paper-based robot moved at low actuation voltages, making it both safer and more energy-efficient.
Prof. Chang explained the inspiration clearly: “Our motivation for this work comes from the fascinating world of nature, specifically the crawling motion of caterpillars. We were intrigued by how such a simple organism could achieve highly efficient locomotion through sequential bending and stretching. I wanted to replicate this elegant mechanism in a soft robotic system, but without the complexity of traditional methods.”
By controlling the electrode patterns, the team could program different types of motion—straight crawling, directional turns, or pauses—showcasing the robot’s versatility.
Why Paper Matters
The choice of paper was not just practical but visionary. As Prof. Lee emphasized, cellulose-based paper has distinct advantages. It is lightweight, flexible, eco-friendly, and compatible with solution-based processing. Unlike rigid materials, paper substrates make it easy to deposit electrodes without expensive machinery, opening the door to scalable and sustainable production.
In a world increasingly conscious of environmental impact, using abundant and biodegradable materials like paper aligns perfectly with the push toward green technologies. These robots, built from something as simple as paper and copper, embody the idea that cutting-edge science does not always require rare or costly resources.
Potential Applications Beyond the Lab
The implications of this innovation are vast. Soft robots that crawl with caterpillar-like efficiency could be deployed in areas inaccessible or unsafe for humans. Imagine a swarm of paper-based robots crawling through rubble after an earthquake to search for survivors, or navigating tight, hazardous spaces in industrial plants. Because they are lightweight and low-cost, they could be used in large numbers, enhancing their effectiveness.
Environmental monitoring is another promising field. Soft robots that move gently through delicate ecosystems could collect data without damaging the environment. Their low power requirements make them ideal for long-term, autonomous tasks in remote or resource-limited settings.
Toward a New Era of Soft Robotics
At its core, this breakthrough represents a shift in mindset. Instead of fighting against complexity, the researchers embraced simplicity—taking cues from nature and combining them with one of humanity’s oldest materials. By merging the elegance of biology with the accessibility of paper, they have charted a path toward practical, affordable, and sustainable soft robotics.
As Prof. Chang pointed out, “By precisely controlling the temperature gradient on the paper-based electrode, we were able to induce differential bending, which mimics the natural crawling motion of a caterpillar. This novel mechanism enables directional and controlled movement for soft robots.”
What began with curiosity about a humble caterpillar has now become a platform for reimagining how machines might move in the future.
Conclusion: Simplicity, Elegance, and Innovation
Albert Einstein once remarked that “everything should be made as simple as possible, but not simpler.” The work from Chung-Ang University embodies this philosophy beautifully. By stripping away unnecessary complexity and drawing from the wisdom of nature, the researchers have crafted a soft robot that is both technically advanced and strikingly simple.
The caterpillar, in its quiet crawl across a leaf, has unknowingly given humanity a blueprint for the future of robotics. From disaster relief to environmental stewardship, the possibilities are as vast as human imagination. And all of it begins with a piece of paper, a bit of copper, and the timeless inspiration of nature’s most humble creatures.
More information: In Hyeok Oh et al, Crawling Soft Robotic Locomotion via Asymmetric Temperature Distribution on Paper‐Based Electrodes, Advanced Functional Materials (2025). DOI: 10.1002/adfm.202512328