For all their strength, precision, and tireless patience, robots still falter at one of the most essential tasks of human life—touch. A child reaching for a steaming mug, a chef flipping a searing pan, or a machinist tightening a bolt in a furnace-warmed factory—these are feats of subtlety, awareness, and responsiveness that today’s most advanced robotic systems still struggle to master.
It’s not for lack of trying. Over the past few decades, roboticists have built hands that can juggle, lift, grip, and press with astonishing mechanical fidelity. But these hands, despite their impressive engineering, often remain unaware of their surroundings in the most human of ways. They don’t feel temperature. They don’t sense fine motion. They don’t know, instinctively, how to pull back from danger or adjust to the unexpected. In high-stakes environments—households, disaster zones, steel mills—the inability to sense, adapt, and respond as humans do can mean the difference between success and catastrophe.
But what if a robot could do more than just look and grip? What if it could truly feel?
A New Sense of Dexterity
In a quiet lab at the University of Southern California, a group of researchers decided to challenge the sensory limits of robotic touch. Led by Ph.D. student Daniel Seita and collaborators Hanyang Zhou, Wenhao Liu, and Haozhe Lou, the team set out to build not just another robotic hand, but a new kind of sensing system—one that could bring a machine closer to the human experience of interacting with the physical world.
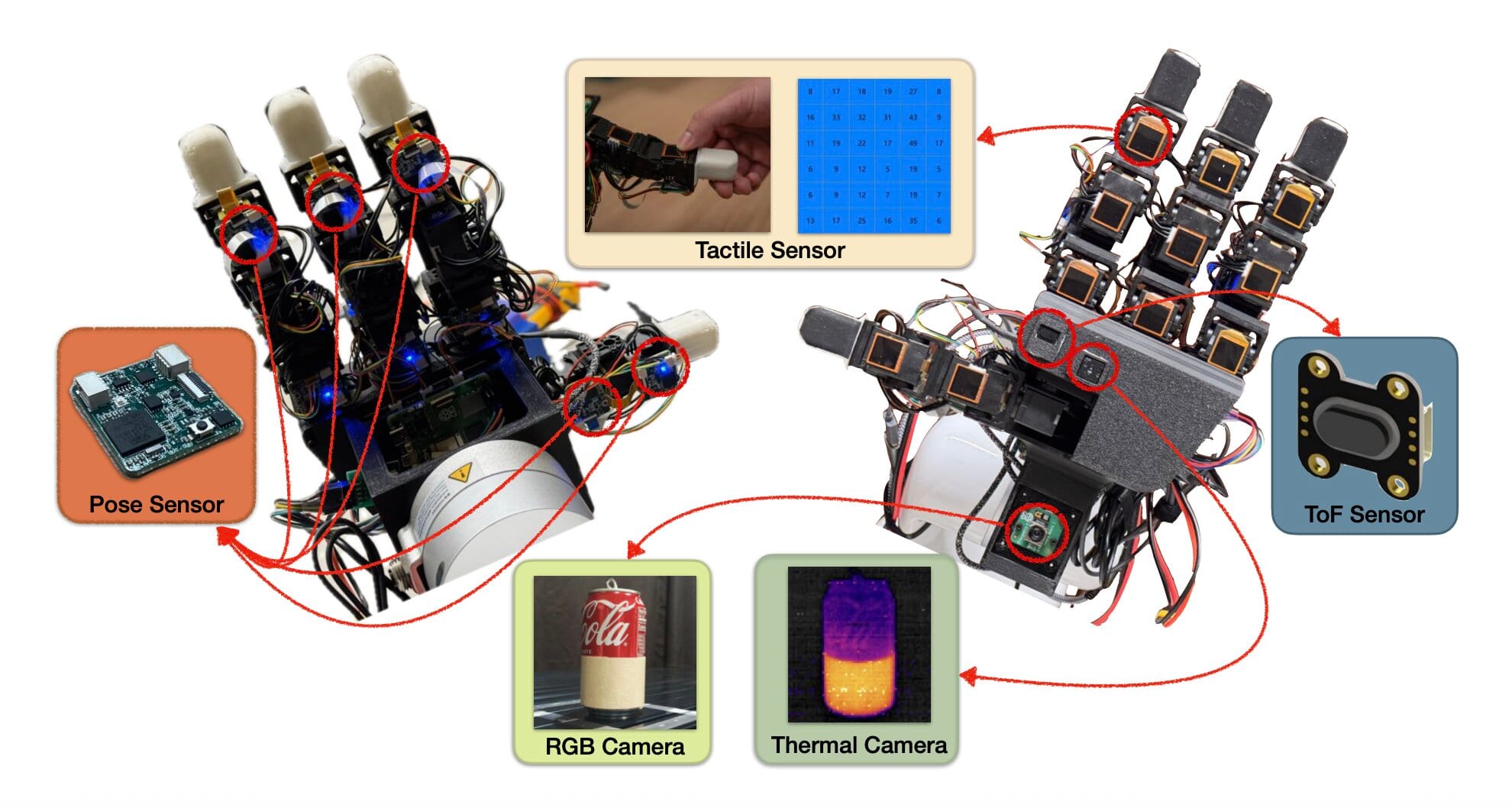
Their answer is MOTIF: the Multimodal Observation with Thermal, Inertial, and Force sensors hand. As its name suggests, this robotic hand doesn’t rely on sight alone. It uses a complex web of sensors—thermal imaging, tactile response, depth perception, inertial tracking, and traditional visual data—to understand the world around it.
“We wanted to move beyond the standard visual-tactile framework,” the team explained. “Too many robotic hands are blind to thermal feedback or physical subtleties. They can’t distinguish a hot skillet from a cool one or tell the difference between two objects of identical shape but vastly different mass. That limitation cripples real-world application.”
So, they designed MOTIF not as a speculative prototype but as a working, extensible platform that could evolve alongside the needs of the robotics community. Built on the popular LEAP hand architecture, the MOTIF hand adds sophisticated new capabilities—essentially upgrading a robot’s sensory nervous system to be more like ours.
Born From Frustration, Built for Possibility
What prompted this leap forward wasn’t just inspiration—it was frustration. The USC team had previously used commercially available robotic hands for their research. But time and again, those tools fell short of the intricate sensing demands of their experiments. They needed a platform that could feel heat gradients, detect slight movements, and adjust to unexpected changes—not just move parts.
“We realized that no off-the-shelf solution gave us the full picture,” Zhou and Liu said. “The tools we could buy focused on mechanical grip and ignored the full sensory reality of how we handle objects as humans. We had to build something better. Something that aligned with how humans perceive and interact with the world every day.”
That “something better” was MOTIF—a hand not just wired to move, but wired to think, sense, and adjust in real time. A system that doesn’t just respond to commands, but interprets the environment with nuance.
How MOTIF Feels the World
At its core, the MOTIF hand is a marvel of layered technology. Its thermal camera reads the temperature profile of the objects it interacts with, helping the system avoid burns or safely grasp items in high-heat environments. The depth sensor builds a three-dimensional map of its surroundings, enabling accurate spatial judgments. An RGB camera offers traditional visual cues, while IMU sensors provide real-time motion tracking—monitoring acceleration, angular velocity, and spatial orientation. Tactile sensors embedded in the fingers provide immediate feedback about surface texture, pressure, and force.
By fusing these different sensory streams, the MOTIF hand doesn’t just “see” an object—it feels its weight, temperature, and resistance. It understands context. It anticipates danger. And it adapts accordingly.
This kind of multimodal fusion is crucial. A robot may be able to visually identify a glass of water on a table, but without thermal or tactile data, it can’t know whether the glass is cold, scalding, or fragile. MOTIF bridges that gap—bringing robots one step closer to human-like decision-making.
Trials by Fire—and Fingertip
To test their creation, the researchers ran two distinct experiments. The first challenged MOTIF’s ability to avoid danger—specifically, hot surfaces. In simulated tasks, the hand had to grasp heated objects without touching the high-temperature zones. Relying on its thermal camera and depth perception, MOTIF navigated these tasks with precision, carefully steering its fingers away from danger and adjusting its grip accordingly.
The second test focused on weight detection. The team gave the hand a set of identical-looking objects that differed only in mass. Rather than relying on external data, MOTIF used its internal inertial sensors and fingertip motion—subtle flicks, nudges, and rotations—to feel how heavy each object was. Through this kind of active tactile exploration, it accurately classified the weights, demonstrating a capability essential for real-world manipulation.
“The ability to classify mass through motion is not trivial,” said Lou. “Humans do it unconsciously all the time—think of picking up a closed box to guess if it’s empty or full. For a robot, that requires intelligent processing of inertial data, motion feedback, and grip response. That’s exactly what we built into MOTIF.”
A Hand for the Home, the Kitchen, the Factory
The implications of this new hand extend far beyond the lab. Imagine a domestic robot that can safely pick up a scalding pot and serve dinner without fumbling the plates. Imagine disaster-response bots sorting through heated debris after a fire, quickly identifying which surfaces are safe to touch. Imagine a robot in a steel mill tightening bolts near molten metal, calculating every force and temperature in real time.
This is not science fiction—it’s the near future, and MOTIF is pointing the way.
“From household environments to professional kitchens and industrial plants, we envision this hand making manipulation tasks smarter, safer, and more humanlike,” Seita said. “Tasks like cooking, welding, or mechanical maintenance demand not just dexterity, but environmental awareness. That’s what MOTIF brings to the table.”
The Next Sensory Frontier
Even as the current prototype demonstrates remarkable potential, the team is already looking ahead. Their plans include integrating Digit 360 sensors—ultra-high-resolution tactile sensors that could provide even finer details of texture, pressure, and motion. The researchers also hope to refine the algorithms that fuse and interpret the multimodal data, making the system smarter, faster, and more responsive.
Eventually, they aim to take the MOTIF hand into far more complex environments—advanced manufacturing, space missions, and search-and-rescue operations—where the cost of error is high and human presence is risky or impossible.
They also hope MOTIF becomes a platform for others, inspiring the broader robotics community to consider the full sensory reality of human tasks. As Zhou noted, “We introduced this as a system, not just a component. We want researchers to think more holistically about what it means to interact with the real world—not just with sight and motion, but with temperature, weight, resistance, texture.”
Their vision was already shared at the ISER 2025 conference in Santa Fe, where the team presented their work to an international audience of robotics experts. The feedback was enthusiastic, and the sense of possibility was palpable.
A Touch More Human
What makes MOTIF so compelling isn’t just that it works—it’s that it feels. In a field long dominated by strength, speed, and logic, this hand introduces something more subtle and powerful: sensitivity. The ability to sense the heat of a surface, the heft of an object, the resistance of a texture. The same instincts that keep our own hands safe and effective are finally arriving in the machines we build.
This may seem like a small step. But in truth, it’s a profound shift. Because when robots begin to feel, not just move, they begin to understand the world as we do. And that changes everything—from the way we cook and clean to the way we rescue and repair.
MOTIF doesn’t just bring robots closer to our level of performance. It brings them closer to our experience.
And that, in the world of robotics, may be the most human achievement of all.
Reference: Hanyang Zhou et al, The MOTIF Hand: A Robotic Hand for Multimodal Observations with Thermal, Inertial, and Force Sensors, arXiv (2025). DOI: 10.48550/arxiv.2506.19201