Floating inside the International Space Station (ISS), where every inch of space counts and every astronaut’s time is precious, a cube-shaped robot whirs quietly to life. Its name is Astrobee—a charming name for what might look like a futuristic toaster, but is in fact one of NASA’s most promising solutions for automating life in orbit.
Developed by NASA Ames Research Center, Astrobee is not a single robot, but a free-flying robotic system composed of three autonomous bots, each capable of navigating microgravity without the need for propulsion from astronauts. These clever cubes are designed to assist with everything from inventory checks to monitoring environmental conditions. But beyond the sleek design and elegant flight patterns lies a complex challenge: manipulating cargo—especially the kind that squishes, bulges, and defies precise handling.
This is where PyAstrobee enters the story—a powerful new simulation and control framework developed by an interdisciplinary team from Stanford University, the University of Cambridge, and NASA Ames. Their aim? To teach Astrobee how to do one of the most tedious but essential jobs in orbit: move cargo from one ISS module to another, even when that cargo is soft, unpredictable, and prone to deformation.
Astrobee: NASA’s Floating Assistant
The idea behind Astrobee is as practical as it is visionary. Operating a space station is hard, monotonous work, filled with repetitive manual tasks that aren’t necessarily dangerous—but still take up valuable astronaut time. With the increased complexity of upcoming missions and the possibility of semi- or fully autonomous stations in the future, such as Lunar Gateway or commercial orbital platforms, robotic assistants like Astrobee are becoming indispensable.
Astrobee is equipped with cameras, sensors, and extendable perching arms. It navigates using a combination of vision-based mapping, fan-based propulsion, and autonomous software that enables it to float gently from task to task. In theory, it can pick up, move, and drop off cargo, assist in maintenance, and even monitor equipment. But theory and reality in space robotics are two very different things.
The Challenge of Deformable Objects
One of the biggest hurdles Astrobee has faced is not navigation or autonomy—it’s object manipulation, especially when the object in question is a soft, deformable cargo bag.
These bags, ubiquitous in the ISS environment, are often made from vinyl-based materials. Unlike rigid tools or instruments, they don’t behave predictably when grasped. Their shape shifts under pressure, their weight distribution varies, and their response to motion is complex and dynamic. Trying to teach a robot to handle them safely—without tearing, crushing, or misplacing them—is a nightmare.
“If you think about how difficult it is to teach a robot to pick up a water balloon without bursting it, that gives you some idea of what we’re dealing with,” says Daniel Morton, first author of the PyAstrobee study and a PhD researcher working closely with NASA Ames. “Astrobee wasn’t originally designed for deformable object manipulation, so we had to rethink the way we approached this problem.”
Enter PyAstrobee: A Virtual Playground for Robot Training
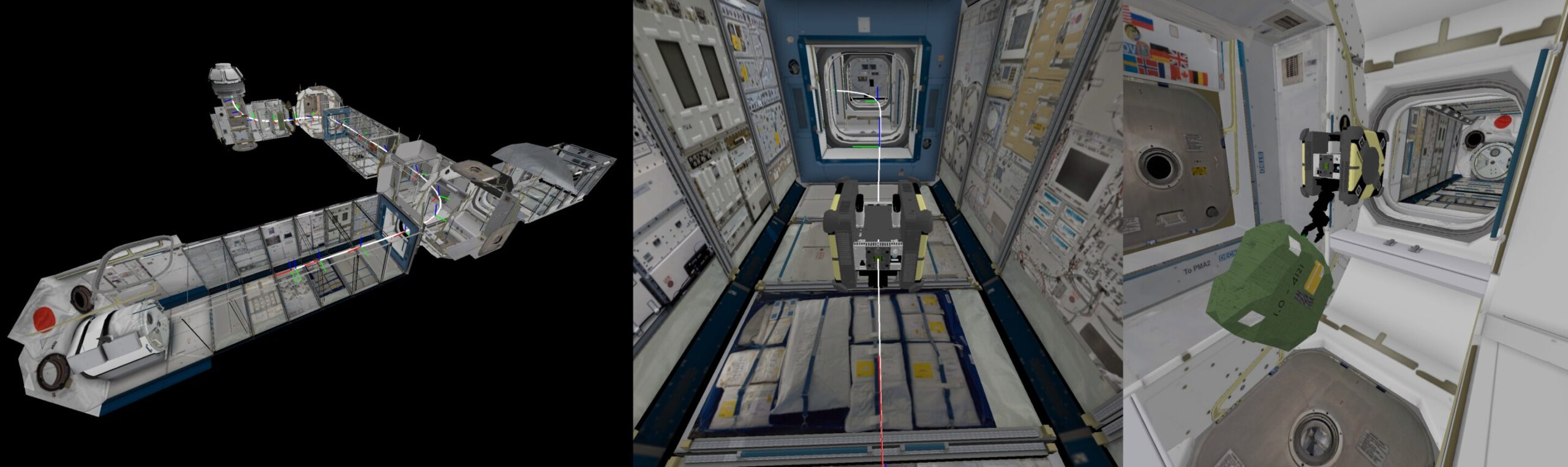
To solve this challenge, Morton and his colleagues built PyAstrobee, a highly realistic simulation environment and control software toolkit developed in Python, designed specifically to address Astrobee’s limitations in cargo handling.
PyAstrobee allows researchers to train, test, and refine manipulation strategies in a virtual replica of the ISS, complete with physics-based modeling of deformable cargo. Its secret weapon? The Bullet physics engine, a powerful open-source physics simulator capable of modeling soft-body dynamics with high fidelity.
But PyAstrobee is more than just a fancy simulator. It’s also a sandbox for cutting-edge artificial intelligence. Integrated with reinforcement learning (RL) platforms like Gymnasium and Stable Baselines, it gives researchers the ability to train Astrobee to learn from trial and error—just as a human might experiment with gripping a duffel bag at different angles to find the right hold.
“We wanted to use model-predictive control, but the real innovation was using the simulator as the model itself,” Morton explains. “By doing this, we can avoid having to mathematically derive a closed-form model of the system, which would be incredibly difficult with deformable objects.”
Learning to Fly and Grip in Zero-G
Training robots to move cargo on Earth is one thing. Doing it in zero gravity, where inertia is unforgiving and even a small force can send a robot or object drifting uncontrollably, is another.
In PyAstrobee, these dynamics are simulated with precision. Researchers can model how a cargo bag behaves when it’s picked up from one end, how it drags behind the robot during movement, or how it reacts when bumped into a module wall. Astrobee must learn not just to pick things up, but to transport them through narrow passageways, avoid collisions, and maintain stability while floating.
“The simulator-in-the-loop approach lets us test how Astrobee and the cargo bag move together,” says Morton. “We’re not just training a robot arm—we’re training a floating spacecraft to become a butler in microgravity.”
Open-Source Innovation for the Next Generation of Space Robotics
One of the most exciting aspects of PyAstrobee is its open-source nature. The full simulator, including its models, controllers, and planning algorithms, is freely available on GitHub, allowing engineers, students, and hobbyists to explore space robotics without ever leaving Earth.
This democratization of tools could accelerate innovation in space robotics, as researchers around the world can now build upon PyAstrobee’s foundation. Whether for graduate research, robotic competitions, or future NASA missions, PyAstrobee may well become the de facto standard for testing autonomous manipulation in space environments.
Morton sees even broader applications on the horizon: “I’m currently working on safety filters that would give real-time guarantees on collision avoidance. These kinds of guarantees are essential if you’re going to trust robots with more complex tasks inside human-occupied environments like the ISS.”
The Next Step: Multi-Robot Collaboration
Perhaps the most tantalizing vision is the future of collaborative robotic manipulation—imagine two or more Astrobees working together to move larger, heavier, or more unwieldy items. Like two movers carrying a couch up a flight of stairs, multiple robots would coordinate their motion, dynamically adjusting their grip and orientation as the object shifts in space.
“Two Astrobees holding either side of the cargo bag could dramatically improve transport stability,” says Morton. “And from a robotics standpoint, it’s a fascinating control problem—distributed planning, real-time coordination, shared load balancing. It’s like a ballet in zero gravity.”
Such scenarios are not science fiction—they’re essential capabilities for the next generation of space stations, which may be unmanned for long periods. In these future habitats, autonomous robots will not just supplement human activity; they will be the primary caretakers, maintaining equipment, replenishing supplies, and keeping the systems running until the next crew arrives.
From ISS to the Moon and Beyond
As NASA sets its sights on the Moon and Mars, technologies like PyAstrobee are critical. Surface habitats on the Moon will need robotic support crews. Supply lines will have to be automated. Cargo will need to be handled efficiently, without human intervention. And robots will need to navigate not just microgravity but partial gravity environments, each with their own quirks and challenges.
PyAstrobee is a small but vital piece of that puzzle. It’s a simulation today—but it’s paving the way for physical autonomy in orbit and beyond, where robots become essential workers in the vast, unforgiving vacuum of space.
A Glimpse into the Robotic Future
In the quiet hum of the ISS, where every movement is measured and every task is mission-critical, the rise of Astrobee and PyAstrobee signals a transformation. No longer bound to Earthly assumptions about gravity or object rigidity, these robots are learning, adapting, and preparing to take on the burden of the most mundane—but essential—tasks in space.
What began as an engineering challenge—how to move a squishy bag in space—has become a doorway into the future of intelligent, collaborative, autonomous systems operating in the most extreme environment known to humanity.
PyAstrobee isn’t just a simulator. It’s a window into the next era of space exploration, where machines don’t just assist astronauts—they partner with them.
Reference: Daniel Morton et al, Deformable Cargo Transport in Microgravity with Astrobee, arXiv (2025). DOI: 10.48550/arxiv.2505.01630