It begins with a question as old as humanity itself: are we alone in the universe? For decades, scientists at NASA have searched the solar system for clues. Mars, with its dry riverbeds and frozen poles, has long been a favorite, but in recent years, two distant icy moons have stolen the spotlight—Europa and Enceladus. Orbiting Jupiter and Saturn respectively, these frozen worlds conceal vast subsurface oceans beneath their brittle, frozen crusts. Where there is liquid water, there may be life.
But reaching these moons and probing beneath their ice is a feat that makes a Mars mission look like a warm-up act. The vast distances, punishing radiation, bone-shattering cold, and rugged, unpredictable terrain pose immense technological challenges. In 2013, a team of visionary engineers at NASA’s Jet Propulsion Laboratory (JPL) accepted the challenge and began working on a bold, outlandish idea: a walking robot that could land on Europa, stride across its icy skin, drill into its crust, and search for signs of alien biology.
A decade later, their dream has been tested, refined, frozen, thawed, and field-tested on Earth’s own icy frontier—Alaska. What began as a conceptual prototype has grown into one of the most sophisticated autonomous space robots ever built. It may never walk on Europa, but its journey has already reshaped how we think about exploration on other worlds.
Europa: A World of Hidden Promise
Europa is not a friendly place. Orbiting Jupiter at over 400 million miles from Earth, the moon is just a bit smaller than our own. But unlike our airless, dead satellite, Europa hides secrets beneath its fractured, ice-encrusted surface. Its outer shell, made of solid ice tens of kilometers thick, covers a liquid ocean potentially twice the volume of all Earth’s seas combined. That ocean is kept warm not by sunlight, which barely reaches the surface, but by tidal flexing—Europa’s interior is kneaded by Jupiter’s powerful gravity, generating heat.
That warmth, combined with water, and possibly nutrients from the seafloor, creates an environment tantalizingly suitable for life. In 1996, the Galileo spacecraft detected evidence of a weak magnetic field likely induced by a conductive fluid beneath Europa’s crust—water mixed with salts. Later, the Hubble Space Telescope spotted what might be plumes of water vapor erupting from surface fractures, possibly delivering material from the ocean into space.
This makes Europa the ultimate scientific temptation: a place where we might find life without having to dig kilometers down. But accessing this potential requires a lander capable of surviving some of the harshest conditions in the solar system—and doing so, at least in part, on its own.
Birth of the Walking Robot
In 2013, a JPL engineering team asked a radical question: what if, instead of rolling across Europa like a Mars rover, a robot could walk?
Wheels, after all, are great on flat desert terrain—but Europa’s surface is expected to be riddled with chaos terrain, jagged ridges, and spiky ice formations known as “penitentes.” The researchers envisioned a four-legged walking robot, able to adapt its gait to the unpredictable alien topography. Think of it as a futuristic blend of astronaut, mountaineer, and scientific laboratory.
The robot was originally dubbed the Europa Lander prototype, but it quickly grew into something more than a concept. The engineers began designing a real, working machine—a full-scale autonomous lander that could operate with minimal Earth guidance. It needed to be rugged, self-aware, and smart.
To walk on Europa, the robot would have to think for itself. Command signals from Earth would take 30 to 50 minutes to arrive and return. That meant no joystick piloting, no instant feedback. The robot would have to plan its own route, assess hazards, and make decisions—all in real time, without human intervention.
Brains, Brawn, and a Lot of Radiation Shielding
At the heart of the lander was an ambitious dual-computer system. One onboard computer handled computer vision, terrain assessment, and decision-making. It analyzed the environment using a stereoscopic camera system—essentially a pair of robotic eyes—equipped with LED lighting to illuminate the terrain even in the dim twilight of Europa’s surface. The other computer was tasked with higher-level control logic: managing tasks, evaluating scientific targets, and ensuring safe operation.
Unlike Mars rovers, which rely heavily on human oversight, the Europa robot was designed to function autonomously for hours or even days at a time. It would walk forward, reorient itself if it stumbled, scan the surface for signs of organic materials, and drill into the ice.
That drill, mounted on a robotic arm, was another marvel. It was engineered to penetrate Europa’s crust, collect samples from beneath the radiation-blasted surface, and deliver them to a miniaturized onboard lab for analysis. Because the surface is constantly bombarded by high-energy particles from Jupiter’s magnetic field, any organic signatures are likely to be buried beneath several inches of ice.
Every component of the lander—from its titanium limbs to its processors—had to be radiation-hardened. Europa’s surface receives over 5.4 Sv (sieverts) of radiation per day, a dose that would kill a human in hours. The robot needed to shrug this off like a polar bear in a snowstorm.
Its legs were carefully modeled using adaptive algorithms, allowing it to adjust its gait depending on terrain—slow and steady over rubble, faster across smooth ice. The sensors in its feet measured pressure, balance, and traction. If it started to slide, the robot could dynamically compensate. Its movements were sometimes awkward but remarkably effective—evolution in machine form, optimized not by nature but by code and necessity.
Testing Ground: From the Lab to the Frozen North
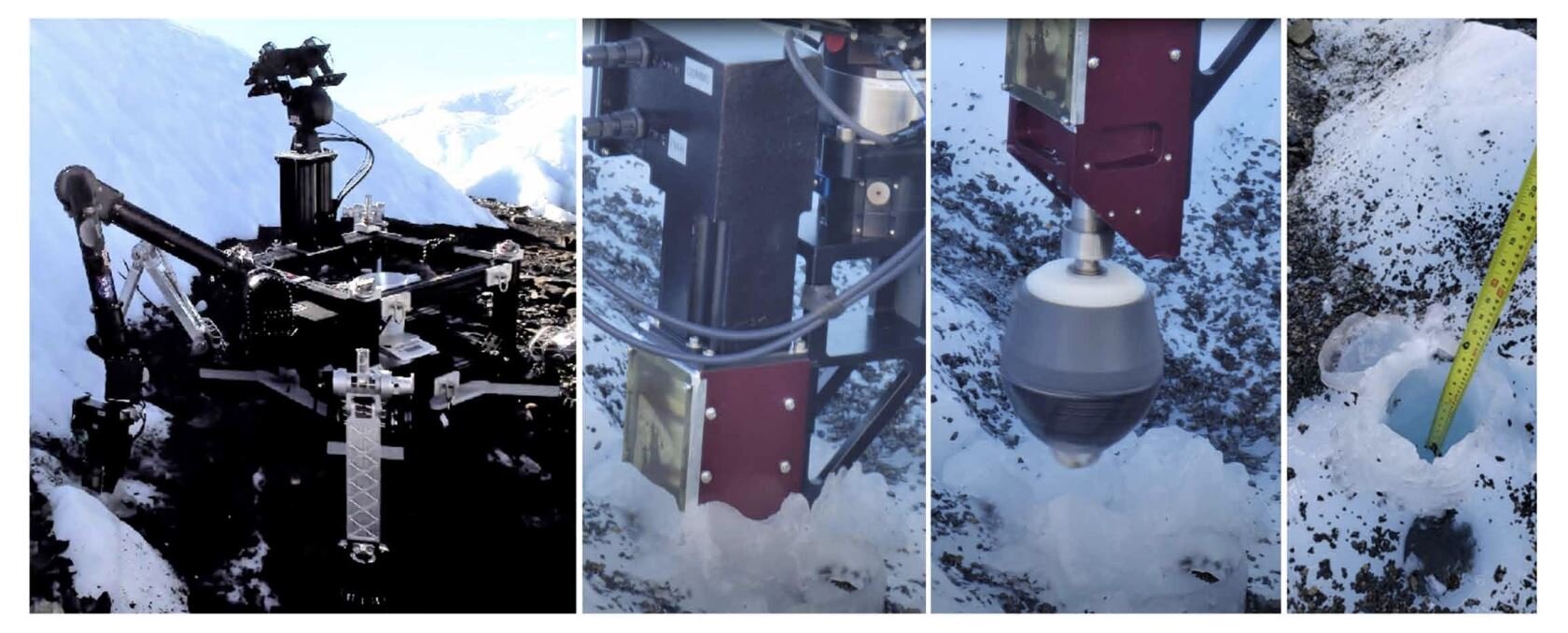
Building the robot was one thing. Proving it could work in an analog environment was another. After countless hours of lab simulation—engineers bombarded the robot with temperature extremes, radiation analogs, and simulated terrain—it was time for a real-world trial. And for that, there was only one choice: Alaska.
Remote, cold, and covered in ancient glacial ice, Alaska mimicked Europa’s surface in critical ways. In 2022 and 2023, the robot was put through its paces on the icy plains and rugged formations of the state’s interior. The results were striking.
The robot navigated uneven ice, drilled into subzero crusts, and autonomously redirected itself around hazards. Its vision systems correctly identified surface materials and returned data-rich sample evaluations. In some tests, it operated for over 12 hours with no human intervention.
The team marveled at how well the lander handled the challenges, particularly in terms of gait stability and real-time environmental adaptation. For a prototype, it was remarkably close to mission-ready. Engineers fine-tuned its software based on the findings, improving its decision matrices and reducing energy consumption—crucial for a lander that might one day rely on limited nuclear power far from the Sun.
A Change in Course: Mission Scrubbed
Then came the heartbreak. In late 2023, NASA’s mission oversight panel officially scrubbed the mission to Europa. The reasons were sobering but not unexpected. The risks were deemed too high: the combination of extreme radiation, high launch mass, and uncertain terrain made the likelihood of mission failure unacceptable. The estimated cost exceeded $4 billion, and NASA’s focus had shifted to other priorities, including the Mars Sample Return program and Artemis missions to the Moon.
The team was disappointed but undeterred. Rather than mothball their robot, they proposed a pivot to Enceladus, Saturn’s icy moon and a less punishing target. Though farther away, Enceladus has lower radiation levels and—perhaps most importantly—plumes of water vapor jetting into space from its south pole. These plumes are like express elevators from the subsurface ocean to space, potentially allowing a robotic lander or even a flyby probe to sample ocean material without drilling at all.
The robot, reconfigured for Enceladus’s gentler conditions, could still make history. It may not need to walk on razor-sharp terrain or dig through ten kilometers of ice. Instead, it could land near the tiger stripe fissures and gather samples from the ice fallout near active jets. The core technology remains sound—autonomy, stability, adaptive mobility—and Enceladus, like Europa, still holds the promise of life.
The Bigger Picture: A New Frontier in Exploration
While this robot may or may not launch, it marks a turning point in space exploration. For decades, landers and rovers have relied on wheels and direct control. This walking robot is something else entirely: a new class of planetary explorer, designed not just to move but to think, adapt, and survive far beyond our reach.
It represents the future of missions to extreme environments—not just icy moons, but perhaps subsurface caverns on Mars, cryovolcanic regions on Pluto, or even asteroid interiors. It reflects a trend toward greater autonomy, which will be critical as humanity moves deeper into the solar system, where time delays and communication blackouts are the norm.
Even if the walking robot never steps onto Europa’s shimmering plains, it has already achieved something profound: it has expanded our technological imagination, proven new concepts, and shown us that life—if it exists—might one day be found not by human eyes, but by a robot that walks, thinks, and dreams beneath the stars.
Reference: J. J. Bowkett et al, Autonomous surface sampling for the Europa Lander mission concept, Science Robotics (2025). DOI: 10.1126/scirobotics.adi5582